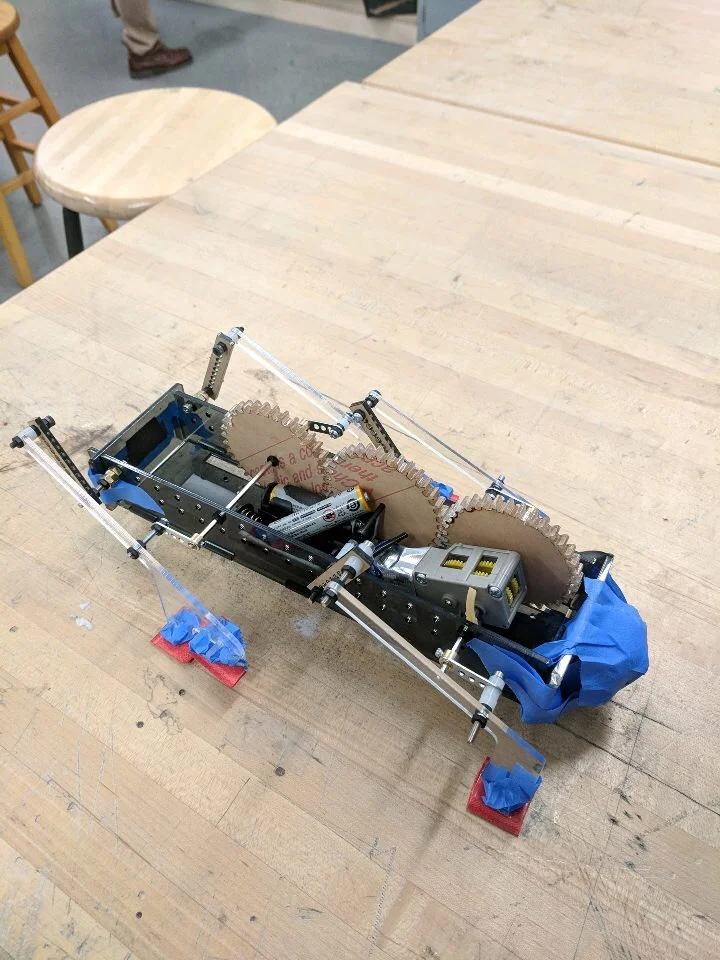
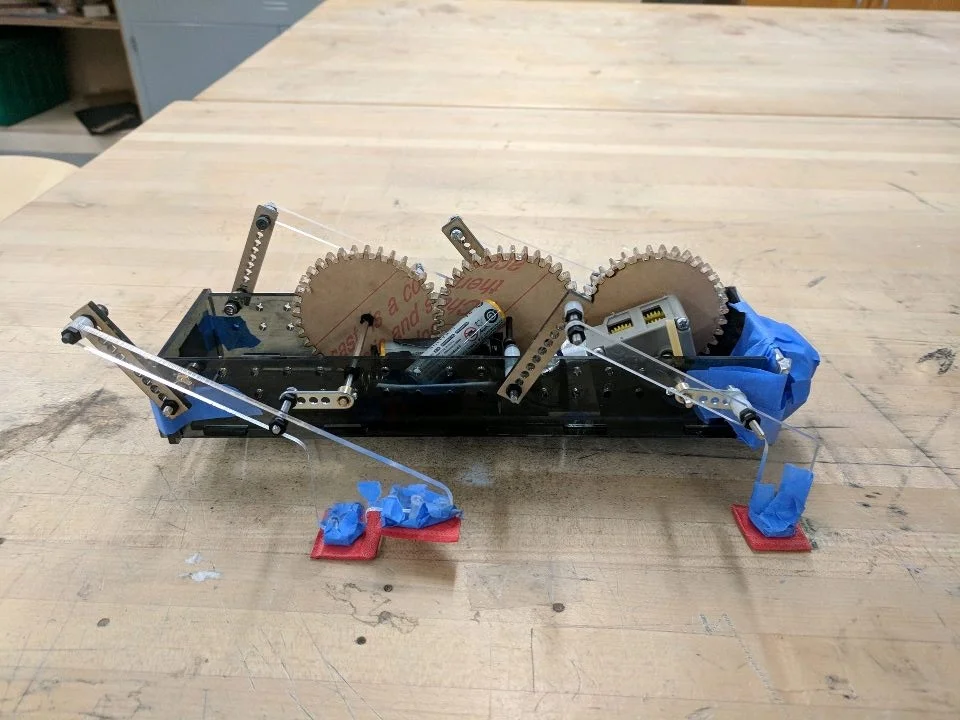
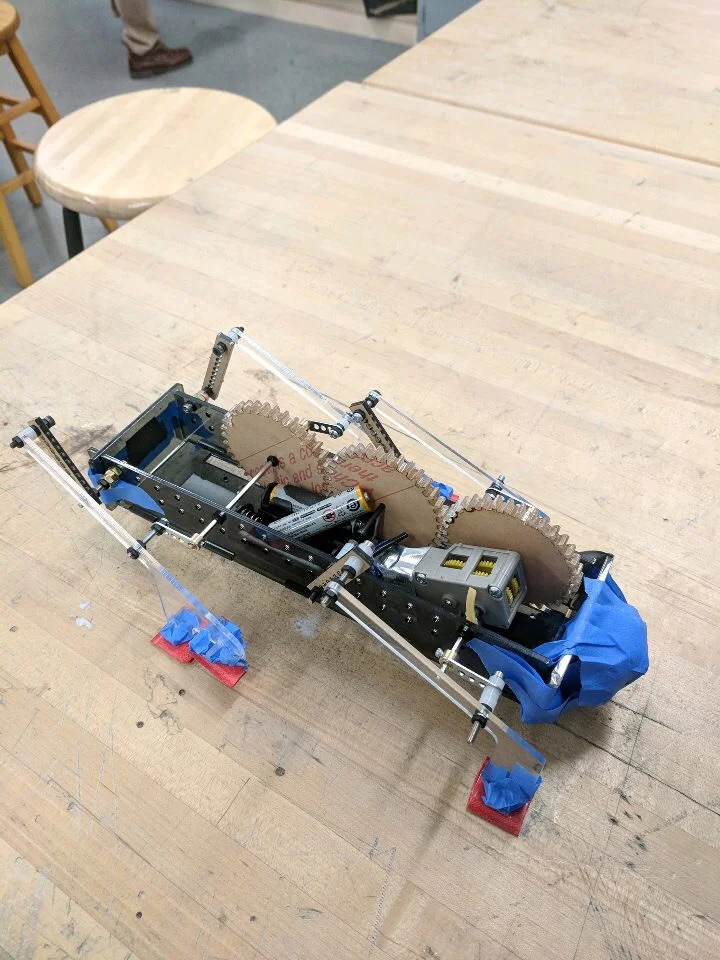
In a team of four, we had to design a walking robot, powered by a single motor, using identical four bar linkages for the legs. The robot had to go over hurdles, stairs, and rocks.